Fregaty wielozadaniowe budowane w ramach programu MIECZNIK w najbliższych latach zastąpią wysłużone okręty typu Oliver Hazard Perry. Jednym z zadań, które po poprzednikach przejmą nowe jednostki, jest Zwalczanie Okrętów Podwodnych (ZOP), czyli obszar głównego przeznaczenia ORP Gen. K. Pułaski i ORP Gen. T. Kościuszko.
W artykule
Oba ex-amerykańskie okręty osiągnęły istotny wkład we wzrost potencjału ZOP sił MW RP i poza przejęciem zadań poprzedników, jednym z celów programu MIECZNIK jest wykonanie kolejnego kroku naprzód. Pośród wymagań operacyjnych stawianych przed nowymi fregatami w obszarze ZOP jest przede wszystkim osiągnięcie zdolności neutralizacji zagrożeń ze strony obecnych i ewoluujących obecnie zagrożeń podwodnych, na rejonach operacyjnych Marynarki Wojennej RP. Oznacza to konieczność stworzenia potencjału do skutecznej konfrontacji z trudnym przeciwnikiem, operującym dodatkowo w trudnym środowisku.
Systemy działu broni podwodnej, z jakimi w latach 2000 – 2002, przyszły ORP Gen. K. Pułaski i ORP Gen. T. Kościuszko, w bardzo ogólnym określeniu, nie były w pełni dopasowanymi względem warunków, w jakich z zadaniami ZOP mierzyć się musi MW RP. Efektem tego była między innymi wymiana głównego uzbrojenia ZOP na tych okrętach (a w późniejszych latach także w lotnictwie morskim) na torpedy MU-90. Kolejnym, ważnym dla zdolności ZOP krokiem, była modernizacja pasywnej stacji holowanej AN/SQR-19 TACTAS.
Zaowocowało to wzrostem efektywności poszukiwania okrętów podwodnych, odnotowanym na etapie rozwoju i prób morskich, a później także podczas operacji i ćwiczeń NATO. Zdobyta między innymi w tych okolicznościach wiedza i doświadczenie, pozwoliły dziś nie tylko lepiej rozumieć zmieniającą się specyfikę działań ZOP ale też identyfikować potrzeby dla przyszłego rozwoju sił. Decyzja o rozpoczęciu budowy nowych okrętów dała możliwość zrobienia użytku z tej wiedzy dobierając narzędzia optymalne dla potrzeb.
Czytaj więcej o okrętach podwodnych i fregatach – „Tata czy Mama?”
Pasywne systemy hydroakustyczne (takie jak wspomniana, zmodernizowana stacja AN/SQR-19PG) były w okresie zimnej wojny głównym narzędziem dozoru podwodnego. Dziś detekcja pasywna w dalszym ciągu pozostaje jednym z narzędzi ZOP, lecz jej rola wyraźnie ustąpiła miejsca nowej generacji sonarów aktywnych niskich częstotliwości LFAS (Low-Frequency Active Sonar). Wynika to z postępów w wyciszeniu okrętów podwodnych i trudności poszukiwania ich, szczególnie w rejonach działań niesprzyjających szumo-namierzaniu.
Podobnie jak w przypadku ORP Gen. K. Pułaski i ORP Gen. T. Kościuszko, nowe fregaty zostaną wyposażone w dwie stacje hydroakustyczne: kadłubową (w gruszce dziobowej) oraz holowaną zmiennej głębokości. Oba wymienione sensory, jak większość pozostałych komponentów bojowych MIECZNIKA, pochodzą z koncernu Thales, co w znacznej mierze redukuje ryzyka związane z integracją całego systemu walki.
Stacja Thales BLUE HUNTER (KINGKLIP Mk2) jest sonarem kadłubowym średniej częstotliwości przewidzianym dla jednostek klasy korweta i fregata. Sensory tej grupy stanowią minimum niezbędne dla okrętów nawodnych w perspektywie zaangażowania ich w działania ZOP. Poza aktywnym poszukiwaniem okrętów podwodnych (zasadniczy reżim pracy), równolegle prowadzony jest pasywny monitoring, celem ostrzegania o zbliżających się do okrętu torpedach.
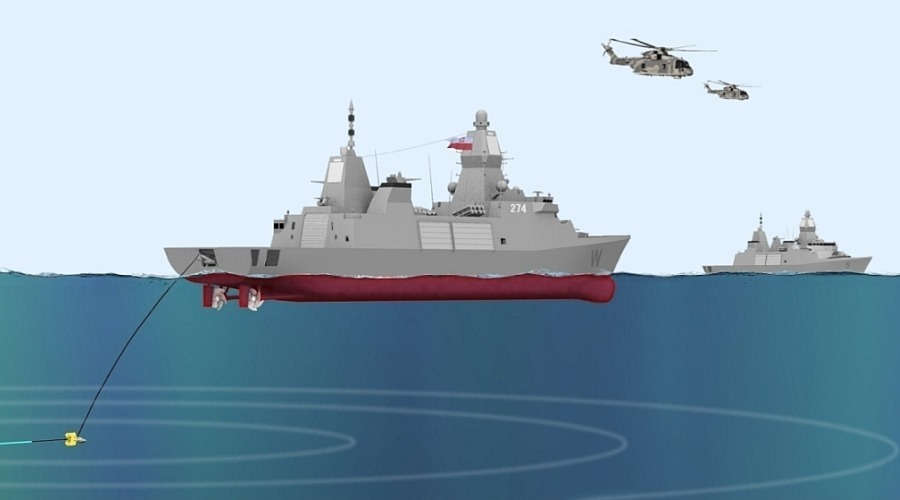
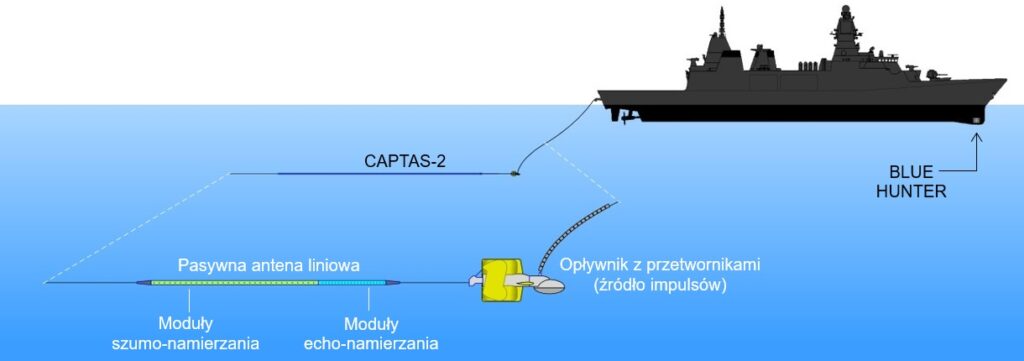
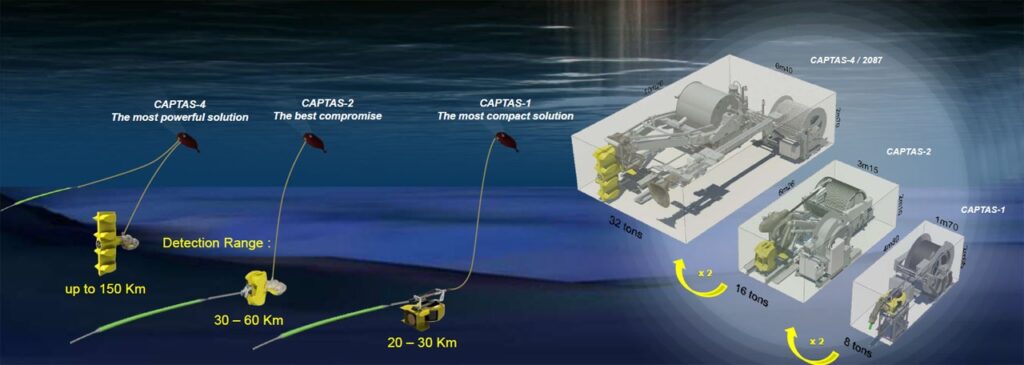
Stacja holowana Thales CAPTAS-2 należąca do podkategorii aktywnych sonarów niskiej częstotliwości LFAS jest elementem wyznaczającym miarę możliwości dozoru podwodnego MIECZNIKÓW i lokującym te okręty o poziom wyżej w stosunku do jednostek wyposażonych w sam sonar kadłubowy. Sonar holowany był i pozostanie sensorem określającym potencjał, a co za tym idzie, miejsce jego nosiciela w taktyce ZOP.
Zdolność pracy aktywnej w niskich częstotliwościach (0,9 – 2,1 kHz) stanowi również znaczny potencjał (daleki zasięg) dla przyszłych zdolności funkcjonowania okrętów w sieci multi-statycznej. Zespół antenowy CAPTAS-2 składa się z elementu aktywnego (źródła impulsów niskiej częstotliwości) umieszczonego w stabilizowanym opływniku, do którego podłączona jest pasywna antena liniowa zawierająca moduły do odbioru odbitych impulsów (echo-namierzania) i dozoru pasywnego (szumo-namierzania). Złożony w ten sposób zespół anten zachowuje bardzo dobrą kontrolę nad utrzymaniem jego zanurzenia na pożądanej głębokości, co jest ważnym atrybutem – szczególnie na akwenach płytkich.
CAPTAS-2 należy do rodziny sonarów CAPTAS (Combined Active Passive Towed Array Sonar) o skalowanej budowie. Oferowana przez koncern gama sensorów pozwala na ich dobór pod kątem dostosowania do warunków operacyjnych oraz nosiciela. Numeracja użyta w nazwie odpowiada liczbie pierścieni przetworników będących źródłem impulsów niskiej częstotliwości.
Czytaj też o suplemencie czyli „Tata czy Mama?”
Oprócz systemów specjalnie dedykowanych dla fregat MIECZNIK, warto także zwrócić uwagę na lotnicze systemy akustyczne. Ich znaczenie rośnie w kontekście przyszłych działań łączonych tych okrętów z nową generacją lotnictwa morskiego, która już teraz wchodzi do służby. Kluczowym narzędziem w poszukiwaniach okrętów podwodnych dla śmigłowców AW-101 są stacje opuszczane Thales FLASH, które mogą znaleźć się również na wyposażeniu nowych śmigłowców pokładowych pozyskanych w ramach programu Kondor. Dodatkowym elementem wzmacniającym te zdolności są pławy radio-hydroakustyczne (PRHA, potocznie nazywane „sonobojami”), w tym również te zaliczane do 'nowej generacji’. Wszystkie te sensory mają potencjał do przyszłych działań multi-statycznych.
W kontekście efektorów broni podwodnej, okręty otrzymają również dwa systemy efektorów broni podwodnej. Pierwszym są dobrze znane, będące już 20 lat na uzbrojeniu sił morskich Marynarki Wojennej RP, lekkie torpedy ZOP typu MU-90 dostarczane przez Francusko-Włoskie konsorcjum EuroTorp. MU-90 jest torpedą III generacji i dzięki prowadzonej przez EuroTorp modernizacji jej podzespołów, pozostaje w czołówce najnowocześniejszych w swojej kategorii.
Producent prowadzi obecnie prace rozwojowe nad nową wersją bojową MU-90HK, która będzie efektorem dwufunkcyjnym. Nowa wersja torpedy, analogicznie do standardowej MU-90TC, będzie służyć do zwalczania okrętów podwodnych, lecz możliwe będzie użycie jej również w funkcji przeciw-torpedy. Wprowadzone modyfikacje nie wpłyną na konieczność zmian w wyrzutni torpedowej czy sieci odpalania, w efekcie czego dedykowana dla samego okrętu (pomijając śmigłowiec pokładowy) jednostka ognia tych torped zabezpiecza dwie zdolności jednym efektorem.
Drugim z efektorów jest system wyrzutni celów pozornych C-Guard firmy Terma. System składa się z zestawu nieruchomych wyrzutni „moździerzowych” kalibru 135 mm, włączonych w centralny system sieci odpalania. Terma C-Guard kojarzony jest głównie jako element systemu walki elektronicznej i obszarem górnej półsfery, lecz w szerokiej gamie odpalanych z jego wyrzutni celów pozornych znajdują się również pociski do obrony przeciw-torpedowej SSTD (Surface Ship Torpedo Defence) SOFTKILL.
Czytaj również: https://portalstoczniowy.pl/fregaty-konie-robocze-flot/
Idea użycia tych pocisków polega na zakłóceniu i przerwaniu procesu naprowadzania torpedy na okręt własny lub/i jednostkę ochranianą a następnie możliwie szybkie opuszczenie strefy zagrożenia torpedowego. Źródłami wysokich ryzyk sytuacji wrogiej torpedy w sąsiedztwie sił, są jej daleki zasięg i logika w układzie samonaprowadzania, który będzie próbował odzyskać kontakt z celem. Oznacza to, że wyjście ze strefy okupione może być dużą ilością środków zakłócających.
Rosnące zapotrzebowanie naprzeciw-torpedowe efektory SOFTKILL, a w ostatnich latach także HARDKILL, jest jednym z nasilających się trendów na świecie. Wynika to ze skali zagrożenia, jakie niesie uzbrojenie główne okrętów podwodnych, czyli torpedy ciężkie, dysponujące przewagą zasięgu i głowicą bojową o bardzo dużej sile rażenia (jedna torpeda jest w stanie zatopić lub co najmniej całkowicie wyłączyć okręt z operacji). Z powodu tego jak trudnym i wysokim ryzykiem obarczony jest proces obrony przeciw-torpedowej, kombinacja efektorów SOFTKILL i HARDKILL zaczyna być postrzegana jest jako konieczność.
Opisane powyżej zdolności fregat MIECZNIK prezentują się bardzo dobrze względem dzisiejszych potrzeb i uwarunkowań operacyjnych. Wybrane komponenty (sensory i efektory) nie zawsze są tymi o największym potencjale pośród dostępnych opcji, lecz nie na tym opierają się kryteria wyboru. Wskazanie optymalnych rozwiązań, których potencjał będzie mógł być w pełni wykorzystany, było jednym z celów analiz podjętych w początkowych fazach programu. Miecznik nie zatrzymał się jednak tylko na perspektywie „dziś”, otwierając drogę na dalszą przyszłość tych okrętów. W zakresie ZOP, widoczne są dwa kolejne obszary dalszego rozwoju:
Poszukiwanie okrętów podwodnych z wykorzystaniem detekcji multi-statycznej, którą można określić mianem „detekcji kolektywnej”, jest aktualnie głośnym hasłem odnoszącym się do postępujących na świecie programów rozwojowych. Działanie to polega na integracji kilku rozproszonych sensorów (aktywnych i pasywnych) we wspólny system dozoru, tak aby jako partycypujące w nim elementy zarówno dawały wkład w postaci własnych impulsów jak i / lub uczestniczyły w detekcji ech pochodzących od innych źródeł emisji (włączonych w system sensorów aktywnych).
Dla ścisłości, akustyczne systemy multi-statyczne osiągnęły już dojrzałość i są operacyjnie stosowane w ramach pojedynczej platformy. Przykładem jest morski samolot patrolowy, operujący multi-statycznie z aktywnymi i pasywnymi pławami radio-hydroakustycznymi. Wyzwaniem jest krok kolejny, czyli zestawienie w taki system „detekcji kolektywnej” osobnych platform (np. okręt ze śmigłowcem ZOP) z ich sensorami (lub sensorami pod ich kontrolą – PRHA).
Pierwszy z opisanych przykładów jest prostszy, ponieważ poza zdolnością samego procesora akustycznego na statku powietrznym, nie wymaga dodatkowych narzędzi koordynacji, a cały proces analizy akustycznej, mimo rozproszenia elementów aktywnych i pasywnych (PRHA) odbywa się w jednym miejscu (na pokładzie statku powietrznego). W drugim przypadku, synchronizacja tego procesu odbywa się pomiędzy kilkoma systemami akustycznymi na różnych platformach (cross-platform multi-static network) do czego potrzebna jest dodatkowa, dedykowana temu procesowi sieć.
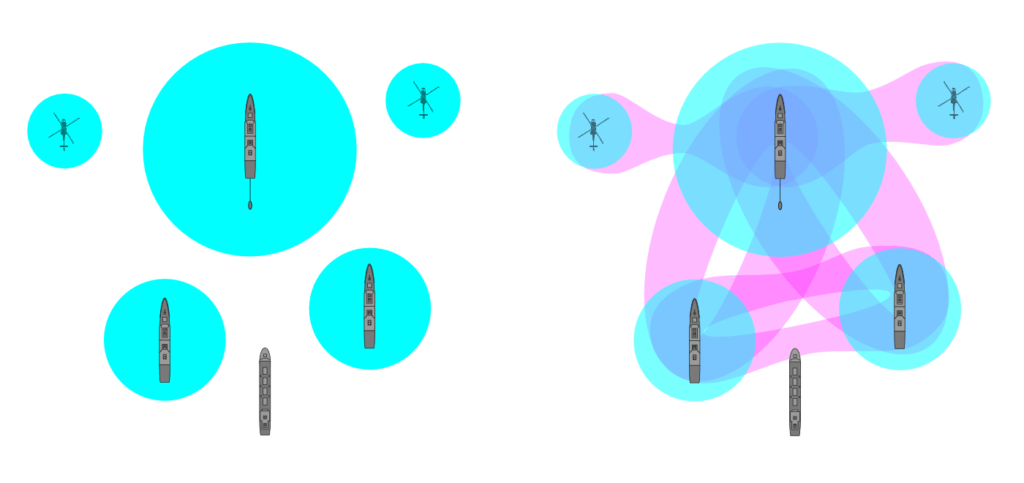
Porównanie stref dozoru w ugrupowaniu jednostek ZOP działających mono-statycznie (po lewej), z tym samym zespołem, działającym dodatkowo w sieci multi-statycznej (po prawej)
Zaletą działania w takiej sieci jest przede wszystkim większa szczelność dozoru oraz unifikacja obrazu akustycznego w jeden spójny dla wszystkich zaangażowanych jednostek. Nowe zdolności pociągają też jednak za sobą kolejne potrzeby i w opisywanym przypadku jest nim przede wszystkim narzędzie do planowania i kontroli przebiegu misji ZOP, które pozwoli na optymalną dyslokację jednostek.
Jednym z rozwijanych dziś rozwiązań, które w przyszłości będą mogły umożliwić sięgnięcie po te zdolności, jest rozwijany przez koncern Thales system BLUE SCAN. Jest to system, integrujący sensory akustyczne jednostek prowadzących poszukiwanie okrętów podwodnych i połączonych we wspólnej sieci. BLUE SCAN synchronizuje działanie sensorów (cykle i parametry emisji) włączonych w sieć oraz dokonuje fuzji obrazu akustycznego.
System BLUE SCAN i analogiczne rozwiązania, zwiększą efektywność poszukiwania okrętów podwodnych i skrócą czas reakcji jednostek ZOP. Zdolność działania w sieci multi-statycznej, stanie się niebawem jedną z głównych miar potencjału ZOP.
Drugą z wyżej wymienionych kwestii, czyli dalszej przyszłości rozwoju MIECZNIKA są platformy bezzałogowe, których udział w działaniach morskich w ostatnich latach bardzo szybko wzrasta. Celem nadążenia za widoczną dziś ewolucją, w projekcie uwzględniono potencjał dla przyszłej integracji systemów bezzałogowych. Okręty będą posiadały przestrzeń na moduły zadaniowe oraz niezbędną infrastrukturę, aby proces integracji, na jakimkolwiek poziomie by nie był, nie wymagał głębokich modyfikacji w systemie walki czy ingerencji w strukturę platformy.
Czytaj więcej o Mieczniku – jaki będzie naprawdę?
Wykorzystanie platform bezzałogowych w operacjach ZOP jest jednym z bardzo prężnych dziś kierunków wynikających, jak w pozostałych obszarach działań bojowych, z ich rosnących zdolności (np. dzięki nowym kompaktowym sensorom) i względnie niskiego kosztu w porównaniu z platformami załogowymi. Szczególne zainteresowanie oraz wysoki poziom zaawansowania rozwoju, można dziś zaobserwować wśród licznych programów platform powietrznych, przewidzianych do działań z pokładu okrętu. Zastąpienie załogowych śmigłowców i morskich samolotów patrolowych ZOP systemami bezzałogowymi nie jest celem tych inicjatyw, mogą jednak odegrać ważną rolę w rozszerzaniu zasięgu działań na rozległych teatrach operacyjnych lub rejonach ograniczonego dostępu lub wysokiego ryzyka.
Rozpiętość mas startowych, testowanych już w siłach morskich na świecie, konstrukcji organicznych (czyli zdolnych do bazowania na pokładzie okrętu) jest bardzo duża, szczególnie widoczna w kategorii wiropłatów. Klasyfikacja jest niestety jeszcze nieunormowana, lecz szeroką gamę rozwiązań jakie można dziś zaobserwować da się dzielić w ramach trzech umownych grup statków powietrznych: lekkich o masie startowej około 200 kg (np. Shiebel S-100), średnich ok. 600-800 kg (np. Airbus VSR-700), aż po ciężkie do 3000 kg (Northrop Grumman MQ-8).
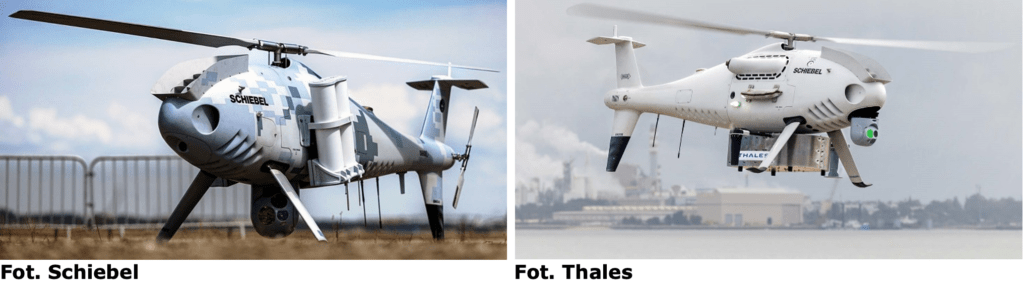
Lekki Statek Powietrzny Shiebel S-100, który obecnie przechodzi testy wariantów dedykowanych ZOP: jednostki zrzucającej PRHA (po lewej) oraz retranslatora danych akustycznych z PRHA (po prawej)
Poza platformami powietrznymi MIECZNIK zapewni także przestrzeń na lekkie bezzałogowce nawodne i gdy pojawi się taka potrzeba także podwodne (po przystosowaniu do opuszczania i podejmowania z wody). W projekcie Arrowhead 140, na bazie którego powstaje Miecznik, przewidziano aż 4 przestrzenie dla łodzi okrętowych, zatem adaptacja np. jednej z nich na potrzeby zaokrętowania podobnej wielkości jednostki bezzałogowej będzie jak najbardziej możliwa, niekoniecznie kosztem innych potrzeb.

Programy z różnych dziedzin często zawierają moduły adaptacji do bazowania na pokładzie okrętów, przykładem jest system ACRIMS opracowany przez Atlas Elektronik UK
Fregaty MIECZNIK, nie były projektowane pod kątem zadań ZOP jako ich misji priorytetowej, jak miało to miejsce w przypadku brytyjskich T26. Polskie okręty nie osiągną tak rygorystycznego poziomu wyciszenia, lecz z drugiej strony operacje na akwenach o wysokich poziomach szumów i trudnych warunkach propagacji są też po części naturalnym maskowaniem, co ma wpływ na próg tego wymogu. Miecznik jako okręt wielozadaniowy, ma zachować proporcje wyważone do potrzeb operacyjnych we wszystkich sferach bojowych, co osiągnie również w ZOP, dając znaczny przyrost zdolności Marynarce Wojennej RP jak i okrętowym grupom zadaniowym NATO w czasie operacji sojuszniczych.
Autor: Kamil Sadowski


W czwartek 29 stycznia w zakładach stoczniowych Taizhou Kouan Shipbuilding Co., Ltd. odbyło się uroczyste wodowanie drobnicowca KOPERNIK, budowanego dla Chińsko-Polskiego Towarzystwa Okrętowego Chipolbrok.
W artykule
Jest to jednostka o nośności 62 000 DWT, zaliczana przez armatora do serii statków określanych jako Multi-Purpose Heavy Lift Vessel. Nadzór klasyfikacyjny nad budową statku sprawuje Polski Rejestr Statków.
Tempo prac nad jednostką KOPERNIK zwraca uwagę nawet na tle innych inwestycji realizowanych w Azji. Zaledwie dwa miesiące po położeniu stępki jednostka została zwodowana i następnie odholowana do nabrzeża wyposażeniowego, gdzie prowadzone będą dalsze prace montażowe i instalacyjne. Sprawna realizacja harmonogramu jest efektem dobrej organizacji produkcji w stoczni oraz ścisłej współpracy z klasyfikatorem i zapleczem technicznym armatora.

Drobnicowiec KOPERNIK jest czwartym statkiem z serii nowoczesnych drobnicowców typu 62 000 DWT Multi-Purpose Heavy Lift Vessel budowanych na potrzeby Chipolbrok. Jednostka dołączy do eksploatowanych już statków YU AN, BOYM i DE AN, wzmacniając potencjał armatora w segmencie przewozów ciężkich i ponadgabarytowych ładunków na rynku międzynarodowym.
Stocznia Taizhou Kouan Shipbuilding Co., Ltd. realizuje budowę statków przeznaczonych do przewozu ładunków drobnicowych i ciężkich, a także kontenerowców oraz masowców. Zakład dysponuje blisko 50-letnim doświadczeniem i wykonuje zamówienia dla armatorów z różnych części świata, w tym serię drobnicowców budowanych dla Chińsko-Polskiego Towarzystwa Okrętowego Chipolbrok.
W ceremonii wodowania uczestniczyli przedstawiciele stoczni, armatora oraz towarzystwa klasyfikacyjnego. Polski Rejestr Statków reprezentowali kierownik Placówki PRS w Szanghaju Chong Wang, specjalista ds. rozwoju biznesu Karol Pokora oraz inspektorzy PRS prowadzący nadzór nad budową jednostki.
Za bieżącą kontrolę jakości i zgodność realizacji z wymaganiami technicznymi odpowiada zespół inspektorów z wieloletnim doświadczeniem w nadzorze nowych budów, kierowany przez Wojsława Babińskiego, wspierany przez Jin Sheng Chena i Wenronga Lu. Ich praca przekłada się na płynny przebieg projektu oraz wysoki standard wykonania statku.
Kolejna wspólna realizacja potwierdza trwałość współpracy pomiędzy PRS i Chipolbrok. Konsekwentnie rozwijane relacje oraz wzajemne zaufanie stanowią solidny fundament dla kolejnych projektów realizowanych na styku polskiego armatora i azjatyckiego przemysłu okrętowego.