Duńczycy zyskują coraz większe uznanie jako pionierzy morskiej energetyki wiatrowej. Ich zaangażowanie w rozwój offshore wind ma kluczową rolę nie tylko w efektywnej transformacji energetycznej kraju, ale również przyczynia się do rozbudowy infrastruktury portowej i umacniania pozycji duńskich firm na arenie międzynarodowej. Dania, dążąc do eliminacji węgla z procesu wytwarzania energii do 2030 roku, planuje realizację nowych, ambitnych projektów w najbliższych latach.
W artykule
W 1988 roku, w związku z przede wszystkim uzależnieniem kraju od importu energii oraz wzrastającego poziomu zanieczyszczenia środowiska, duński rząd zapowiedział ograniczenie emisji dwutlenku węgla o 22% do 2005 roku. Biorąc pod uwagę wprowadzoną trzy lata wcześniej ustawę zakazującą budowę elektrowni jądrowych, fundamentem transformacji energetycznej miały być odnawialne źródła energii.
Mimo że morska energetyka wiatrowa właściwie nie istniała w tamtym okresie (chociaż technologia lądowych farm wiatrowych była rozwijana już w latach 70. ubiegłego wieku), z czasem stała się ona kluczowym elementem duńskiej polityki energetycznej. Należy podkreślić, że Dania jest znakomicie zlokalizowana geograficznie do budowy farm wiatrowych na morzu, co związane jest przede wszystkim z wysoką średnią prędkością wiatru w obrębie wód terytorialnych tego kraju.
Uruchomienie w 1991 roku pierwszej morskiej farmy wiatrowej (Vindeby) było niewątpliwie przełomowym wydarzeniem z perspektywy globalnej. Za budowę pierwszej farmy wiatrowej odpowiedzialna była duńska firma Bonus Energy A/S, która przez wiele lat była jednym z liderów na rynku w zakresie produkcji turbin wiatrowych na morzu (firma została wykupiona przez niemiecki Siemens w 2004 roku).
Na przestrzeni kolejnych lat zaobserwować można ciągły wzrost aktywnych turbin wiatrowych. Pod koniec 2020 roku, w Danii funkcjonowało 14 morskich farm wiatrowych (MFW), generujących łączną moc 1,7GW (co stanowi prawie 7% całej mocy generowanej przez wszystkich morskie farmy wiatrowe w Europie).

Energetyka wiatrowa jest obecnie fundamentem duńskiego systemu energetycznego – w 2021 roku farmy wiatrowe (morskie i lądowe) generowały prawie 50% wytwarzanej w kraju energii elektrycznej. Należy zaznaczyć, że w Danii funkcjonuje obecnie prawie dwukrotnie więcej lądowych turbin wiatrowych niż ich morskich odpowiedników. Ponadto, zapotrzebowanie energetyczne tego kraju jest znacząco niższe niż w przypadku przykładowo Polski. Danii udało się jednak zrealizować plan uniezależnienia się od paliw kopalnych oraz zdecydowanego zwiększenia udziału OZE w krajowym bilansie energetycznym.
Wieloletnie inwestycje w rozwój energetyki wiatrowej przełożyły się na wyspecjalizowanie krajowych firm w zakresie produkcji turbin wiatrowych oraz realizacji budowy farm morskich, ale także rozbudowanie infrastruktury portowej, która jest kluczowym zapleczem logistycznym dla projektów MFW.
W Danii operuje kilka głównych portów instalacyjnych, które wykorzystywano podczas realizacji projektów nie tylko na duńskich wodach terytorialnych, ale także wspomagały one budowę brytyjskich, holenderskich czy też niemieckich morskich farm wiatrowych.
Wyróżnić można tu przykładowo port w duńskim Esbjerg, który odegrał centralną rolę w rozwoju duńskiego sektora wind offshore, wspomagając realizację projektów MFW od 2000 roku. Port o powierzchni 450 hektarów, położony jest w strategicznym miejscu, dzięki czemu wykorzystywany był przy realizacji prawie 70% farm wiatrowych na Morzu Północnym.
Jest on także znakomicie skomunikowany (rozbudowana sieć drogowa i kolejowa), a także dysponuje nabrzeżami o łącznej długości 14 km. Warto podkreślić, że port jest ciągle rozwijany – w 2020 roku ogłoszono, iż na nowe inwestycje (które obejmują m.in. nowe magazyny oraz warsztaty przeznaczone do prefabrykacji oraz konstrukcji komponentów turbin wiatrowych) przeznaczono 135 milionów euro. W związku z realizacją tej inwestycji port zatrudni około 2000 nowych pracowników.
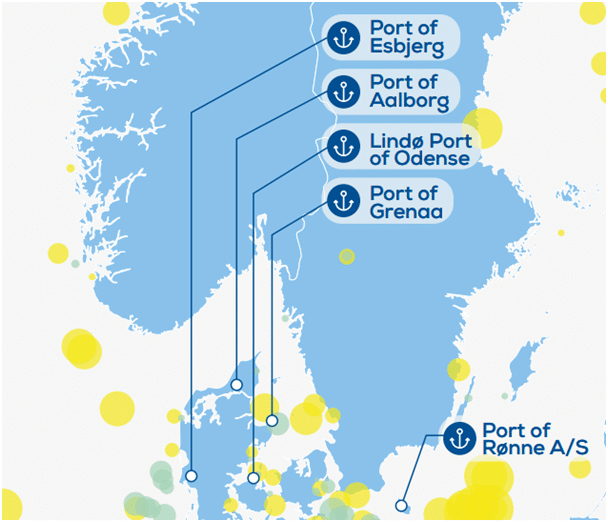
Pomimo dużej efektywności portu w Esbjerg w Danii funkcjonuje kilka innych portów instalacyjnych – między innymi położony na wyspie Bornholm terminal w Roenne, który w 2021 roku został wskazany jako kluczowy port instalacyjny dla kilku projektów realizowanych w rejonie niemieckiej części Morza Bałtyckiego. W Roenne zrealizowano liczne inwestycje w latach 2017-2019, które miały na celu przystosowanie portu do pełnienia roli portu instalacyjnego (co obejmowało między innymi pogłębienie toru wodnego).
Rozbudowa duńskich portów morskich nie jest jednak jedynym efektem związanym z rozwojem energetyki wiatrowej w Danii. Bardzo istotną kwestią jest wiodąca pozycja duńskich producentów turbin wiatrowych, połączona z wysokimi dochodami z eksportu. Wyróżnić można jednak przede wszystkim firmę Vestas, która jest największym producentem elektrowni wiatrowych na świecie. Kolejnym duńskim przykładem jest Ørsted, największy na świecie deweloper morskich farm wiatrowych.
Doświadczenie duńskiego przemysłu zostanie także wykorzystane przy realizacji polskich projektów offshore wind. Na początku lutego 2021 roku PGE Polska Grupa Energetyczna i Ørsted podpisały umowę o utworzeniu spółki joint-venture dla budowy dwóch elektrowni wiatrowych na Bałtyku – Baltica 2 i Baltica 3 – składających się na Morską Farmę Wiatrową Baltica o łącznej mocy ok. 2,5 GW. Ich eksploatacja ma się rozpocząć w latach 2026-2027. PGE Baltica realizuje także projekt Baltica 1, który osiągnie moc ok. 1 GW, a którego oddanie do użytku planowane jest po 2030 roku. Do 2040 roku PGE chce posiadać przynajmniej 6,5 GW mocy zainstalowanej w technologii offshore.
W przypadku Danii rodzime firmy odegrały kluczowe znaczenie w łańcuchu dostaw do projektów morskich. Przełożyło się to na tworzenie nowych miejsc pracy oraz liczne korzyści ekonomiczne w skali makro oraz mikroekonomicznej. Dla PGE również ważny jest lokalny wkład, zwłaszcza w kontekście budowy portu instalacyjnego dla polskiego sektora morskiej energetyki wiatrowej, a także portów serwisowych.
Niezwykle istotne z naszego punktu widzenia jest to, że terminal instalacyjny powstanie w Polsce, o co od początku zabiegamy. Od początku też podkreślamy, jak istotny jest rozwój wszystkich portów na polskim Pomorzu, bo od tego zależy długofalowe powodzenie całego polskiego programu offshore.
Dariusz Lociński, prezes zarządu PGE Baltica
Jednak polski wkład w rozwój morskiej energetyki wiatrowej w Polsce chcemy wykorzystywać także w innym wymiarze – poprzez współpracę z najlepszymi polskimi instytucjami naukowymi. Rozumiemy to jako budowę bazy wiedzy niezbędnej do rozwoju morskiej energetyki wiatrowej w Polsce w długim okresie. Inwestycja w kapitał ludzki i intelektualny zawsze się opłaca. Tam, gdzie funkcjonują największe ośrodki naukowo-badawcze, tam kwitnie biznes. Pomorskie ośrodki naukowe mogą stanowić zaplecze R&D dla firm energetycznych budujących farmy wiatrowe na Bałtyku. Dlatego PGE Baltica zainwestowała we współpracę m.in. z jednostkami naukowymi Polskiej Akademii Nauk w Gdańsku, a także z uczelniami – Politechniką Gdańską i Uniwersytetem Morskim w Gdyni.
Dariusz Lociński, prezes zarządu PGE Baltica
Dania planuje dalszy rozwój morskiej energetyki wiatrowej, wyznaczając cel zwiększenia mocy generowanej z MFW do 7,2GW do 2030 roku. Plany na najbliższe osiem lat obejmują m.in. zbudowanie hubów energetycznych. Budowa dwóch węzłów energetycznych i związanych z nimi morskich farm wiatrowych (jednym będzie sztuczna wyspa na Morzu Północnym, drugi powstanie na wyspie Bornholm) jest według wielu ekspertów rewolucyjnym projektem, który może zwiększyć efektywność morskiej energetyki wiatrowej.
Hub energetyczny ma służyć jako węzeł, który zbiera energię elektryczną z okolicznych morskich farm wiatrowych i dystrybuuje ją pomiędzy krajami połączonymi siecią energetyczną. Ponadto, pozyskana energia może być wykorzystana do produkcji przyjaznych dla klimatu paliw (przykładowo wodoru) dla żeglugi, lotnictwa oraz przemysłu ciężkiego. Sztuczna wyspa zlokalizowana 80 km od zachodniego wybrzeża Jutlandii ma zostać oddana do użytku do końca 2030 roku. Szacuje się, że początkowa moc obu hubów wyniesie 5 GW. Później zostaną one rozbudowane do łącznej mocy 12 GW.
Pozostałe zaplanowane projekty dotyczą rozbudowy farm wiatrowych na Morzu Bałtyckim (Hesselø) oraz Morzu Północnym (Thor).
Strategia obrana przez Danię w latach 80. ubiegłego wieku ilustruje, że wieloletnie inwestycje w morską energetykę wiatrową mogą przełożyć się na liczne korzyści społeczno-ekonomiczne.
Duńska transformacja energetyczna była złożonym procesem, który w założeniu miał jednak przełożyć się na szereg korzyści dla duńskich firm, przemysłu portowego, a także dla zwykłych obywateli. Duński rząd stworzył także odpowiednie regulacje prawne dotyczące m.in. wsparcia finansowego projektów oraz systemu rekompensaty dla osób zamieszkujących w okolicy morskich farm wiatrowych.
Na mocy ustawy nr 122 z dnia 6 lutego 2015 r. o promocji energetyki odnawialnej właściciele MFW zlokalizowanych w odległości mniejszej niż 16 km od linii brzegowej, są zobowiązani do zaoferowania 20% udziałów we własności farm wiatrowych, lokalnym mieszkańcom zamieszkałym w odległości 4,5 km od lokalizacji farmy wiatrowej lub zamieszkałym w gminie posiadającej linię brzegową w odległości do 16 km od lokalizacji MFW.
Biorąc pod uwagę polskie plany rozwoju morskiej energetyki wiatrowej, jednym z kluczowych elementów wydaje się maksymalizacja udziału w projektach tzw. local content, co pozwoliłoby polskim przedsiębiorstwom na zebranie cennych doświadczeń, które następnie mogłyby być wykorzystywane przy realizacji projektów morskiej energetyki wiatrowej dla krajów bałtyckich.
Autor: Jan Siemiński


Administracja Donalda Trumpa sonduje możliwość przeniesienia części produkcji okrętów wojennych US Navy do zakładów stoczniowych państw sojuszniczych. Wśród analizowanych kierunków pojawia się Turcja, gdzie amerykańscy urzędnicy prowadzili rozmowy dotyczące budowy komponentów oraz fregat. Informacje te przekazał portal Mideast Eye.
W artykule
Według cytowanych źródeł problem opóźnień dotyczy obecnie wszystkich programów budowy okrętów US Navy. Sekretarz marynarki wojennej USA przyznał, że harmonogramy pozostają daleko w tyle za planami. Program fregat typu Constellation został ograniczony do dwóch kadłubów z uwagi na narastające koszty i terminową realizację tego programu. Sam prezydent USA publicznie dopuścił możliwość zamawiania okrętów wojennych w państwach sojuszniczych w celu uzupełnienia tej luki.
Jak podkreślił jeden z amerykańskich urzędników w rozmowie z Mideast Eye, „amerykański przemysł okrętowy znajduje się w poważnym kryzysie”, co skłania administrację do poszukiwania rozwiązań poza granicami kraju.
W tym miejscu muszę się na chwilę zatrzymać i odnieść do wcześniejszych tekstów, które publikowałem na łamach naszego portalu o wejściu południowokoreańskiego kapitału do amerykańskich stoczni. Pisałem wówczas o inwestycjach Hanwha, HD Hyundai i Samsung Heavy Industries, bo to był i nadal jest ważny sygnał zmiany w myśleniu Waszyngtonu o własnym przemyśle okrętowym. Ten kierunek nie zniknął i nic nie wskazuje na to, by miał zostać porzucony.
Dlaczego więc dziś pojawia się Turcja? Odpowiedź jest dość prosta. Koreańczycy nie przyszli do Stanów Zjednoczonych po to, by „załatwić problem” w rok czy dwa. Oni zajmują się odbudową fundamentów: modernizacją zaniedbanej infrastruktury, porządkowaniem procesów produkcyjnych, szkoleniem ludzi i przywracaniem zdolności do seryjnej budowy okrętów. To jest praca na lata, a nie szybki remont. Jeżeli ten proces się powiedzie, USA odzyskają przemysłowe zaplecze, bez którego nie da się utrzymać pozycji morskiego mocarstwa.

Rozmowy z Turcją dotyczą zupełnie innego wymiaru tego samego problemu. US Navy funkcjonuje pod silną presją czasu, a bieżących potrzeb floty nie da się „zamrozić” do momentu, aż filadelfijskie doki po modernizacji ruszą pełną parą. Z tego powodu Ankara nie jest postrzegana jako alternatywa dla koreańskiego modelu odbudowy przemysłu, lecz jako możliwe rozwiązanie pomostowe – sposób na częściowe odciążenie systemu, który już dziś pracuje ponad swoje realne możliwości.
Innymi słowy: Koreańczycy mają odbudować przemysł, Turcja – jeśli do tego dojdzie – miałaby pomóc przetrwać okres przejściowy. Jedno nie wyklucza drugiego, a wręcz pokazuje, jak głęboki jest kryzys, z którym mierzy się dziś amerykański przemysł okrętowy.
Turcja nie pojawia się w tych rozważaniach przypadkowo. W Waszyngtonie postrzegana jest jako partner, który już dziś dysponuje realnymi zdolnościami produkcyjnymi. Tureckie stocznie od lat pracują w modelu rozproszonej budowy okrętów, mają doświadczenie w produkcji seryjnej i potrafią realizować kontrakty eksportowe w krótkich cyklach czasowych. Okręty dla własnej marynarki wojennej oraz zagranicznych odbiorców powstają w oparciu o nowoczesne zaplecze projektowe i produkcyjne, które nie wymaga wieloletniej odbudowy.

W praktyce ewentualna współpraca mogłaby przybrać różne formy – od dostaw bloków kadłubowych i podzespołów do stoczni amerykańskich, przez przekazywanie częściowo wyposażonych kadłubów, aż po realizację kontraktów na kompletne jednostki. Jak zwraca uwagę turecki komentator obronny Kubilay Yildirim, Stany Zjednoczone zmagają się dziś z brakami kadrowymi, niedostateczną infrastrukturą stoczniową oraz ograniczoną liczbą doków. W tym sensie Turcja mogłaby pomóc nie tylko zwiększyć wolumen produkcji, lecz także rozłożyć obciążenia i ryzyka w okresie, gdy amerykański system pracuje na granicy swoich możliwości.
Na tym etapie warto jednak jasno zaznaczyć, że ewentualna współpraca z Turcją nie jest pozbawiona poważnych ograniczeń. Ankara od lat prowadzi wielowektorową politykę zagraniczną, utrzymując robocze relacje z Rosją, co w Waszyngtonie pozostaje źródłem trwałej nieufności. Zakup rosyjskich systemów przeciwlotniczych S-400 skutkował objęciem Turcji amerykańskimi sankcjami oraz jej wykluczeniem z programu F-35. Choć podejmowane są próby złagodzenia tych restrykcji, temat pozostaje politycznie drażliwy i daleki od jednoznacznego rozstrzygnięcia.

Drugą barierą, często pomijaną w publicznych rozważaniach, są ograniczenia prawne obowiązujące w samych Stanach Zjednoczonych. Tzw. poprawka Byrnesa-Tollefsona, zapisana w 10 USC §8679, zakazuje budowy okrętów US Navy oraz ich kluczowych komponentów w zagranicznych stoczniach. Jej obejście lub zmiana wymagałaby nie tylko decyzji politycznej, lecz także zgody Kongresu i zabezpieczenia odpowiednich środków budżetowych na kontrakty realizowane poza terytorium USA.
Choć rozmowy z Turcją mają na tym etapie wyłącznie charakter rozpoznawczy, sam fakt ich prowadzenia jest czytelnym sygnałem zmiany myślenia w Waszyngtonie. Amerykańska administracja coraz wyraźniej rozdziela dziś dwa porządki: długofalową odbudowę własnego przemysłu okrętowego oraz konieczność utrzymania zdolności operacyjnych floty tu i teraz.
To właśnie ta logika tłumaczy, dlaczego równolegle pojawiają się inwestycje południowokoreańskie w amerykańskich stoczniach oraz rozmowy z Turcją o potencjalnej produkcji okrętów wojennych. Nie jest to brak konsekwencji ani chaos decyzyjny, lecz konsekwencja skali kryzysu, z którym amerykański przemysł okrętowy nie musiał mierzyć się od dziesięcioleci.