W ramach trwającego procesu dostawy autonomicznego systemu treningowego AUV62-AT firmy Saab, odbył się ważny etap jakim były próby morskie. W próbach tych udział wzięły jednostki pływające MW RP: okręt zabezpieczający wodowanie i podejmowanie pojazdu AUV oraz fregata rakietowa.
W artykule
Celem całego przedsięwzięcia jest odbudowa potencjału i zdolności prowadzenia przez MW zaawansowanego szkolenia ZOP (Zwalczanie Okrętów Podwodnych), które znacząco obniżyły się po wycofaniu ze służby okrętów podwodnych t. Kobben. System AUV62-AT umożliwi prowadzenie realistycznego szkolenia niezależnie od dostępności okrętu podwodnego.
Problematyka dostępności okrętu podwodnego do szkoleń ZOP dotyczy również państw morskich dysponujących rozbudowanymi, aktywnymi siłami podwodnymi. Przyczyną tego stanu są obciążenia operacyjne, których wzrost (widoczny w ostatnich latach) powoduje, że jednostkom sił ZOP, brakuje w procesie realizowanych szkoleń „partnera” do realistycznego treningu.
Autonomiczne pojazdy podwodne stanowiące główny element systemów treningowych ZOP dzielą się na dwie główne kategorie: jednorazowe oraz odzyskiwane. Przedstawicielem pierwszej grupy jest powszechnie używany przez siły NATO system Mk-39 EMATT (Expendable Mobile Acoustic Training Target). Głównymi atutami tego urządzenia są: niewielkie rozmiary i prostota użytkowania. Urządzenie nie wymaga ani adaptacji platformy, ani dodatkowej infrastruktury. Po prostym zaprogramowaniu wodowane jest „z ręki” i po zakończeniu swojej misji tonie.

Mk-39 EMATT obok pojemników dla pław radio-hydroakustycznych
Drugą z wymienionych kategorii (odzyskiwanych AUV) reprezentuje obecnie dość szeroka skala rozwiązań: począwszy od tych o rozmiarach zbliżonych do opisanego EMATT, po konstrukcje oparte na ciężkich torpedach kalibru 533 mm. Opisywany w niniejszym artykule system należy do tej ostatniej grupy, zajmując jednocześnie czołowe miejsce pod względem potencjału szkoleniowego.

AUV62-AT zasztormowany na pokładzie okrętu MW RP w trakcie prób morskich
| Jednorazowy EMATT | Odzyskiwany AUV-ATT |
| Zalety: brak infrastruktury wydawania/podejmowaniaograniczenia warunków pogodowych dotyczą tylko sił ZOP Ograniczenia:analiza scenariusza treningowego tylko na podstawie rejestracji jednostek ZOPzakres symulacji pól (brak lub bardzo ograniczone pasmo niskich częstotliwości) | Zalety: szeroki zakres symulacji pól fizycznychanaliza scenariusza treningowego na bazie danych z jednostek ZOP i rejestratora AUV Ograniczenia:warunki pogodowe do wodowania i podjęcia AUV |
Powyższe porównanie nie służy wskazaniu lepszego rozwiązania. Biorąc pod uwagę zalety i ograniczenia, jedno rozwiązanie nie wyklucza drugiego i każde ma swoje miejsce w działalności sił. Z tego powodu większość sił morskich posiadających zdolności ZOP wykorzystuje oba rozwiązania (EMATT oraz system odzyskiwany).
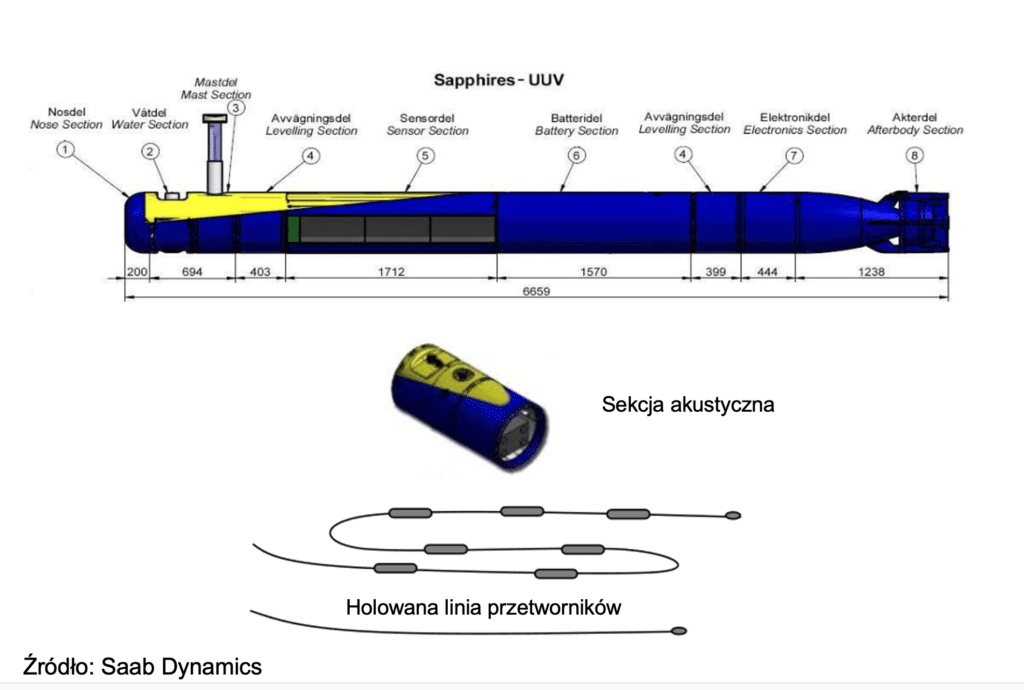
Rozwój systemu AUV62-AT sięga już 25 lat, przy czym pierwsze 10 lat obejmowało prace nad samą platformą (autonomicznym pojazdem). Bazą do budowy platformy była ciężka torpeda kalibru 533 mm, co wiązano z potencjałem dla przyszłych kierunków użycia pojazdów przez okręty podwodne (z wyrzutni torped). Wykorzystanie torpedy jako bazy, wbrew pozorom nie było ułatwieniem dla prac projektowych. Zasadniczą różnicą są cechy kinetyczne obu platform. W miejsce zdolności osiągania wysokiej prędkości ok 50 węzłów, projektowany AUV62 miał charakteryzować się długotrwałością działań oraz precyzją kontroli zanurzenia przy niskich prędkościach (ok 5 węzłów). W efekcie, AUV62 w rzeczywistości tylko przypomina torpedę, posiada bowiem zupełnie inną sekcję energetyczną i napęd, a także nieobecną w torpedach sekcję kontroli zanurzenia z systemem balastowym do regulacji neutralnej pływalności.
Kalendarz rozwoju systemu AUV62
1999 – powstaje prototyp AUV62-F
2005 – rozwój demonstratora SAPPHIRES
2008 – SAPPHIRES osiąga gotowość operacyjną
2010 – powstaje moduł akustyczny (sekcja i holowana linia przetworników) dla AUV62-AT
Efektem pierwszego etapu rozwoju był demonstrator SAPPHIRES (Synthetic APerture Processing HI-REsolution Sensor), który w 2008 roku osiągnął gotowość operacyjną. Od 2010 roku, w porozumieniu z MW Szwecji, podjęto inicjatywę do przystosowania pojazdu do roli mobilnego akustycznego celu treningowego do szkoleń ZOP.
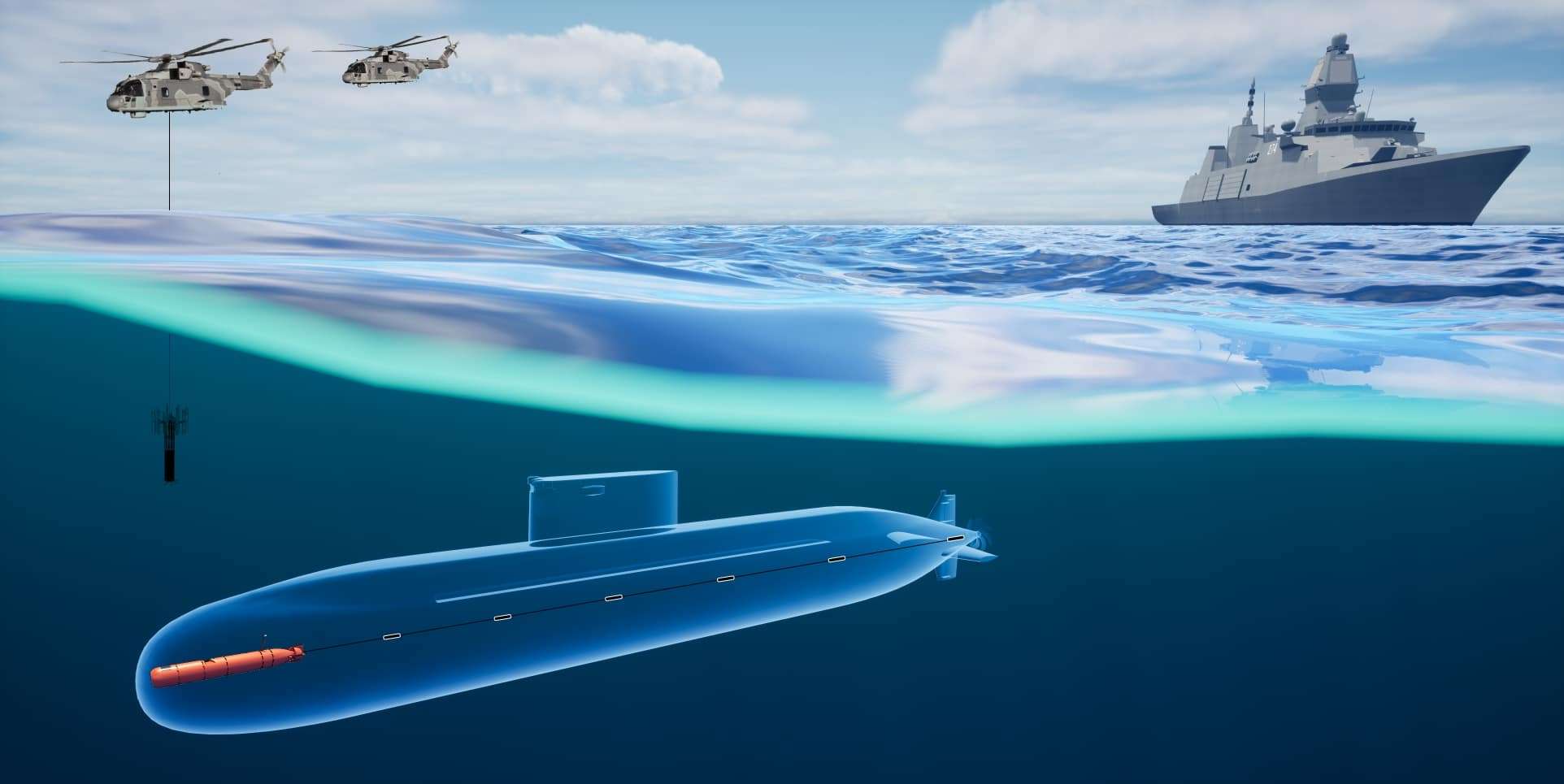
Idea podjęcia tego kierunku wynikała z rosnących potrzeb szkoleniowych oraz zabezpieczenia testów morskich programów badawczo-rozwojowych (między innymi na rzecz rozwoju nowych typów torped). Elementem głównym tego przedsięwzięcia była sekcja akustyczna, pełniąca funkcję generatora sygnatur do symulacji celu w detekcji aktywnej i pasywnej. Ponadto, dla uzyskania symulowanego echa o realistycznej, przypominającej okręt podwodny charakterystyce, sekcja akustyczna współpracuje z przetwornikami na holowanej za pojazdem kablo-linie.
Wspomniana sekcja jest odpowiedzialna za symulację pola akustycznego, bez udziału której sam pojazd nie byłby w stanie spełniać swojej roli. Przyczyną są cechy fizyczne pojazdu, który jest zbyt małym obiektem, aby mógł być wykryty typowym sonarem do poszukiwania okrętów podwodnych, pracujących w zakresie średnich lub niskich częstotliwości. Na potrzeby detekcji aktywnej, system funkcjonuje jako tzw. transponder akustyczny, odpowiadający na przychodzący impuls (sonaru aktywnego) sygnałem o odpowiednich parametrach. Natomiast dla symulacji celu dla detekcji pasywnej, generator szumów odpowiada za emisję sygnałów naśladujących sygnaturę pożądanego celu.
O poziomie zaawansowania poszczególnych systemów treningowych stanowią następujące parametry i funkcjonalności:
Ostatnia z wymienionych funkcji jest zdolnością kluczową dla wykorzystania systemu jako cel dla ćwiczebnych strzelań torpedowych, która zarazem wyznacza najwyższy pułap pośród tych urządzeń. Dzięki długiej linii holowanych przetworników, AUV62-AT generuje realistyczne echo, tworzące cel o wymaganych charakterystykach dla nowoczesnych, lekkich torped ZOP (jak np. znajdująca się na wyposażeniu MW RP torpeda MU-90). Pod tym względem, produkt firmy Saab do niedawna był jednym z nielicznych posiadającym tę funkcję, zweryfikowaną i potwierdzoną licznymi próbami morskimi z użyciem ćwiczebnych torped.
Opisywana zdolność często deklarowana jest w materiałach promocyjnych innych lżejszych systemów, jednak trzeba mieć na uwadze istotne niedopowiedzenie. W przypadku nowoczesnych lekkich torped ZOP nie będzie możliwa realizacja przez układ samonaprowadzania torpedy pełnego cyklu ataku (na pewnym etapie biegu torpedy taki cel zostanie przez USN odrzucony).
Osiągnięcie wymienionych funkcjonalności (szczególnie zdolności emisji niskich częstotliwości, dodatkowo w czasie długotrwałej misji) wiąże się między innymi ze znacznymi potrzebami energetycznymi, co wpływa na platformę, czyli pojazd AUV. W chwili wyboru AUV62-AT był największym i najbardziej zaawansowanym systemem treningowym pośród wszystkich systemów odzyskiwanych. System jest również obiektem zainteresowania US Navy planującej zastąpienie eksploatowanego od 1974 roku Mk-30, również opartego na bazie torpedy ciężkiej.
Obecnie, grupa ta powiększa się o podobnej wielkości system Seagent M-T, francuskiej firmy Naval Group, którego konstrukcja także wykorzystuje elementy ciężkich torped kalibru 533 mm. Francuskie rozwiązanie jest odpowiednikiem, który podobnie do AUV62-AT, także posiada zdolność profilowania echa (dzięki holowanej linii przetworników transpondera akustycznego) oraz interakcji z sonarami niskiej częstotliwości. Ciekawą funkcjonalnością jest możliwość osiągania wyższych prędkości (powyżej 20 węzłów) dla symulacji okrętów podwodnych o napędzie nuklearnym.
Konsekwencją opisywanych zdolności jest masa pojazdu AUV, która w przypadku AUV62-AT sięga około 800 kg (1 tony w przypadku Seagent M-T) oraz rozbudowany zestaw obsługowy (system transportu etc.), co ogranicza swobodę realizacji szkoleń, jaką z kolei zapewniają urządzenia lżejsze, szczególnie porównując z wymienionym wcześniej Mk-39 EMATT.
Z drugiej strony, Mk-39 EMATT jak i inne podobnej wielkości rozwiązania, nigdy nie będą w stanie dorównać ich większym odpowiednikom pod względem realizmu symulacji ani zapewnić niczego powyżej poziomu podstawowego treningu dla hydroakustyków i ograniczonego szkolenia taktycznego.

AUV62-AT w trakcie podejmowania po misji. Widoczna holowana kablo-lina z przetwornikami
Pośród dostępnych na rynku systemów o analogicznym przeznaczeniu istnieje kilka dróg kompromisu pomiędzy wielkością pojazdu a możliwościami symulacji. Mowa o rozwiązaniach pośrednich pomiędzy EMATT a ciężkimi jak AUV62 lub Seagent M-T (np. na bazie pojazdów AUV rodziny Gavia lub Osprey). Dokonując selekcji, w pierwszej kolejności należy odpowiedzieć na pytania: jak ważny jest dla nas rozwój zdolności ZOP i jak często na potrzeby szkolenia dostępny będzie okręt podwodny. Kolejną kwestią jest zakres symulacji, który musi uwzględniać charakterystyki sensorów ZOP. W tym przypadku pod uwagę brane były obecnie eksploatowane, ale przede wszystkim też sensory pozyskiwane w ramach programów rozwoju SZ (śmigłowce AW-101, wielozadaniowe fregaty programu Miecznik).
System AUV62-AT zapewni siłom morskim RP, obecnym jak i przyszłym najwyższy potencjał szkoleniowy jaki można dziś zaoferować w warunkach symulacji ćwiczeń ZOP. Biorąc pod uwagę trudną sytuację w jakiej obecnie znajdują się siły podwodne MW RP, sięgnięcie po opisywane rozwiązanie jest logiczną i słuszną decyzją.
Autor: Kamil Sadowski


W czwartek 29 stycznia w zakładach stoczniowych Taizhou Kouan Shipbuilding Co., Ltd. odbyło się uroczyste wodowanie drobnicowca KOPERNIK, budowanego dla Chińsko-Polskiego Towarzystwa Okrętowego Chipolbrok.
W artykule
Jest to jednostka o nośności 62 000 DWT, zaliczana przez armatora do serii statków określanych jako Multi-Purpose Heavy Lift Vessel. Nadzór klasyfikacyjny nad budową statku sprawuje Polski Rejestr Statków.
Tempo prac nad jednostką KOPERNIK zwraca uwagę nawet na tle innych inwestycji realizowanych w Azji. Zaledwie dwa miesiące po położeniu stępki jednostka została zwodowana i następnie odholowana do nabrzeża wyposażeniowego, gdzie prowadzone będą dalsze prace montażowe i instalacyjne. Sprawna realizacja harmonogramu jest efektem dobrej organizacji produkcji w stoczni oraz ścisłej współpracy z klasyfikatorem i zapleczem technicznym armatora.

Drobnicowiec KOPERNIK jest czwartym statkiem z serii nowoczesnych drobnicowców typu 62 000 DWT Multi-Purpose Heavy Lift Vessel budowanych na potrzeby Chipolbrok. Jednostka dołączy do eksploatowanych już statków YU AN, BOYM i DE AN, wzmacniając potencjał armatora w segmencie przewozów ciężkich i ponadgabarytowych ładunków na rynku międzynarodowym.
Stocznia Taizhou Kouan Shipbuilding Co., Ltd. realizuje budowę statków przeznaczonych do przewozu ładunków drobnicowych i ciężkich, a także kontenerowców oraz masowców. Zakład dysponuje blisko 50-letnim doświadczeniem i wykonuje zamówienia dla armatorów z różnych części świata, w tym serię drobnicowców budowanych dla Chińsko-Polskiego Towarzystwa Okrętowego Chipolbrok.
W ceremonii wodowania uczestniczyli przedstawiciele stoczni, armatora oraz towarzystwa klasyfikacyjnego. Polski Rejestr Statków reprezentowali kierownik Placówki PRS w Szanghaju Chong Wang, specjalista ds. rozwoju biznesu Karol Pokora oraz inspektorzy PRS prowadzący nadzór nad budową jednostki.
Za bieżącą kontrolę jakości i zgodność realizacji z wymaganiami technicznymi odpowiada zespół inspektorów z wieloletnim doświadczeniem w nadzorze nowych budów, kierowany przez Wojsława Babińskiego, wspierany przez Jin Sheng Chena i Wenronga Lu. Ich praca przekłada się na płynny przebieg projektu oraz wysoki standard wykonania statku.
Kolejna wspólna realizacja potwierdza trwałość współpracy pomiędzy PRS i Chipolbrok. Konsekwentnie rozwijane relacje oraz wzajemne zaufanie stanowią solidny fundament dla kolejnych projektów realizowanych na styku polskiego armatora i azjatyckiego przemysłu okrętowego.